Какие профессии связаны с робототехникой. Мехатроника - что это такое? Основы мехатроники
Электор 2008 №7-8
Работа ёмкостных датчиков прикосновения основана на электрической ёмкости человеческого тела. Например, когда близко к датчику подносят палец, то это создаёт ёмкость между датчиком и землёй, лежащую в диапазоне 30...100 пФ. Этот эффект может быть использован в датчиках приближения и переключателях, управляемых прикосновением.
Сенсорные ёмкостные датчики имеют очевидные преимущества по сравнению с другими датчиками (например, срабатывающими от наводок частотой 50/60 Гц или измеряющими сопротивление), но они более трудоёмки в реализации. Производители микросхем, такие как Microchip в прошлом создали специальные ИС для этих целей. Однако и сейчас можно создать надёжный ёмкостный детектор и/или переключатель, используя только небольшое число стандартных компонентов.
В этой схеме мы детектируем изменения ширины импульсов сигнала, возникающие при касании контакта. На рисунке 1 можно рассмотреть следующие узлы (слева направо):
Рис. 1. IC1 - 561ТЛ1
Генератор прямоугольных импульсов, выполненный на триггере Шмитта (ИС CD4093);
RC цепь с гасящим диодом, за которыми идёт триггер Шмитта/контактная пластина с изолирующим конденсатором ёмкостью 470 пФ;
- Интегрирующая RC цепь, преобразующая изменения ширины импульсов в напряжение. Это напряжение лежит в районе 2,9...3,2 вольт, когда до пластины дотрагиваются, и 2,6 вольт в другом случае.
- Компаратор LM 339 используется для сравнения напряжения в точке C с образцовым напряжением в точке D. Последнее составляет около 2,8 В и устанавливается делителем напряжения.
Как только произойдёт касание сенсорной пластины, выход схемы станет активным. Для пояснения работы схемы на рисунке 2 приведены осциллограммы сигналов в разных точках. Пунктирная линия показывает состояние при касании пластины датчика, сплошная линия - при отсутствии касания.
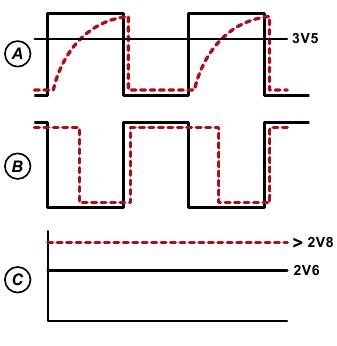
Рис. 2. Осциллограммы сигналов а разных точках.
Образцовое напряжение в точке D настраивается один раз с помощью делителя R4/R5 (изменяя значение R4). Величина этого напряжения сильно зависит от площади поверхности пластины-датчика (обычно несколько квадратных сантиметров). Большая площадь поверхности пластины увеличивает ёмкость и напряжение в точке C тем не менее будет больше, по сравнению с тем напряжением, когда пластины не касались. Образцовое напряжение в точке D должно быть установлено ближе к значению 3,4 В. Датчик прикосновения может так же работать с пластинами большой площади (например, можно использовать в качестве сенсора весь корпус).
Выходной сигнал может быть использован для включения различных нагрузок. Во многих случаях рекомендуется добавить на выход один триггер Шмитта, особенно если выход соединён с цифровым входом.
Вим Абуйс

Рис. 4. Расположение компонентов на печатной плате.

Рис. 5. Печатная плата.


Рис. 6. Печатная плата (зеркальный вид).
Датчик касания для Arduino
Модуль представляет собой сенсорную кнопку, на его выходе формируется цифровой сигнал, напряжение которого соответствует уровням логических единицы и нуля. Относится к емкостным датчикам касания. С такого рода устройствами ввода данных мы сталкиваемся при работе с дисплеем планшета, айфона или тачскрин монитора. Если на мониторе мы нажимаем на иконку стилусом или пальцем, то здесь для этого используется область поверхности платы размером с иконку Windows касание которой производится только пальцем, стилус исключается. Основа модуля микросхема TTP223-BA6 . Есть индикатор питания.
Управление ритмом воспроизведения мелодии
При установке в прибор сенсорную область поверхности платы модуля закрывают тонким слоем стеклотекстолита, пластмассы, стекла иди дерева. К преимуществам емкостной сенсорной кнопки относится большой срок службы и возможность герметизации передней панели прибора, антивандальные свойства. Это позволяет использовать датчик касания в работающих на открытом воздухе приборах в условиях прямого попадания капель воды. Например, кнопка дверного звонка или бытовые приборы. Интересно применение в оборудовании умный дом - замена выключателей освещения.
Характеристики
Напряжение питания 2,5 - 5,5 В
Время отклика на касание в различных режимах потребления тока
низкое 220 мс
обычное 60 мс
Выходной сигнал
Напряжение
высокий лог. уровень 0,8 Х напряжение питания
низкий лог. уровень 0,3 Х напряжение питания
Ток при питании 3 В и логических уровнях, мА
низкий 8
высокий -4
Размеры платы 28 x 24 x 8 мм
Контакты и сигнал
Нет касания - выходной сигнал имеет низкий логический уровень, касание - на выходе датчика логическая единица.
Почему это работает или немного теории
Тело человека, как и все что нас окружает, обладает электрическими характеристиками. При срабатывании датчика прикосновения проявляются наши емкость, сопротивление, индуктивность. На нижней стороне платы модуля расположен участок фольги соединенный с входом микросхемы. Между пальцем оператора и фольгой на нижней стороне расположен слой диэлектрика - материал несущей основы печатной платы модуля. В момент касания происходит заряд тела человека микроскопическим током, протекающим через конденсатор, образованный участком фольги и пальцем человека. При упрощенном рассмотрении ток протекает через два последовательно соединенных конденсатора: фольга, палец находящихся на противоположных поверхностях платы и тело человека. Поэтому если поверхность платы закрыть тонким слоем изолятора, то это приведет к увеличению толщины слоя диэлектрика конденсатора фольга-палец и не нарушит работу модуля.
Микросхема TTP223-BA6 фиксирует ничтожный импульс микротока и регистрирует прикосновение. Благодаря свойствам микросхемы работать с такими токами никакого вреда такая технология не наносит. Когда мы касаемся корпуса работающего телевизора или монитора через нас проходят микротоки большей величины.
Режим пониженного потребления
После подачи питания датчик касания находится в режиме пониженного энергопотребления. После срабатывания на 12 секунд модуль переходит в обычный режим. Если далее касание не произошло, то модуль вернется в режим пониженного потребления тока. Скорость реакции модуля на касание в различных режимах приведена в характеристиках выше.
Работа совместно с Arduino UNO
Загрузите в Arduino UNO следующую программу.
#define ctsPin 2 // Контакт подключения линии сигнала датчика касания
int ledPin = 13; // Контакт для светодиода
Void setup() {
Serial.begin(9600);
pinMode(ledPin, OUTPUT);
pinMode(ctsPin, INPUT);
}
Void loop() {
int ctsValue = digitalRead(ctsPin);
if (ctsValue == HIGH){
digitalWrite(ledPin, HIGH);
Serial.println("TOUCHED");
}
else{
digitalWrite(ledPin,LOW);
Serial.println("not touched");
}
delay(500);
}
Соедините датчик касания и Arduino UNO как показано на рисунке. Схему можно дополнить включающимся при касании датчика светодиодом, подключенным через резистор 430 Ом к контакту 13. Сенсорные кнопки часто оснащают индикатором касания. Так удобней работать оператору. При нажатии на механическую кнопку мы чувствуем щелчок независимо от реакции системы. Здесь новизна технологии немного удивляет из-за нашей моторики сложившейся годами. Индикатор нажатия избавляет нас от излишнего ощущения новизны.

Предлагаемая для повторения схема представляет собой усилитель, обладающий высокой чувствительностью к электромагнитному полю, создаваемому внешними устройствами. При подключении входного контакта схемы к антенне светодиод сигнализирует о наличии излучения электромагнитного поля и наводок от электрооборудования. Светодиод также будет индицировать факт прикосновения к контакту, так как роль антенны в данном случае выполняет тело человека. Отсюда и название - датчик прикосновения. Другое название схемы - активная антенна .
Принципиальная схема датчика прикосновения показана на Рисунке 1.
Схема напоминает автогенератор на транзисторе n-p-n структуры. Один из выводов обмотки L1 подключается непосредственно к входному контакту X1. Полярность включения светодиода VD1 не имеет значения. Резистор R2 ограничивает ток через светодиод и, тем самым, определяет яркость его свечения при срабатывании датчика.
Датчик прикосновения собран на макетной плате размером 40 × 40 мм. Внешний вид конструкции показан на Рисунке 2.
 |
|
| Рисунок 2. | Внешний вид датчика прикосновения. |
Обмотки L1 и L2 расположены на общем каркасе с двумя секциями для намотки и подстроечным ферритовым сердечником. Наружный диаметр каркаса - 10 мм, длина сердечника - 23 мм, диаметр резьбы у основания сердечника - 6 мм. В конструкции, показанной на Рисунке 2, L1 намотана на верхней секции, L2 - на нижней. Каждая катушка содержит 100 витков провода ПЭЛ 0,2. Обмотки включены согласно. При помощи отвертки сердечник ввинчивается внутрь каркаса. Светодиод VD1 - любой из серии АЛ307 . В качестве Х1 использован лепесток заземления. Прикосновение к нему вызывает зажигание светодиода.
Параллельно VD1 можно подключить измерительный прибор, к примеру, мультиметр в режиме измерения напряжения, что позволит оценивать уровень напряженности поля. В этом случае внешняя антенна может представлять собой отрезок монтажного провода длиной несколько сантиметров. Настройка схемы будет сводиться к выбору длины антенны и поиску такого положения сердечника, при котором напряжение на светодиоде максимально.
Схема не привередлива к выбору элементной базы. К примеру, в первоначальном варианте схемы применялся транзистор КТ815Г , сопротивление резистора R1 составляло 100 кОм. В качестве L1 и L2 использовались две катушки на стержневом ферритовом сердечнике длинноволновой магнитной антенны из радиоприемника. Катушки можно было двигать вдоль сердечника. При перемещении катушек наблюдались явления, не противоречащие закону электромагнитной индукции, в отличие от схемы, предложенной в . При значительном удалении катушек друг от друга и без ферритового сердечника схема работать переставала.
Практическое применение схема может найти не только при конструировании измерителей напряженности поля, но и в устройствах автоматики и сигнализации. Датчик прикосновения можно подключить к микроконтроллеру. Для этого следует выполнить аналого-цифровое преобразование напряжения на светодиоде VD1, возможно, с помощью ресурсов самого микроконтроллера, если он содержит встроенный АЦП.
В заключение необходимо отметить, что существует немало схем датчиков прикосновения, основанных на полевых транзисторах и не содержащих индуктивных элементов. Возможно, их работа во многих случаях более эффективна, но конструкция, приведенная в этой статье, является примером оригинального технического решения и ориентирована на начинающих радиолюбителей.
Литература
- Бровин В. И. Явление передачи энергии индуктивностей через магнитные моменты вещества, находящегося в окружающем пространстве, и его применение. - М.: МетаСинтез, 2003 - 20 с.
- Крылов К. С., Ли Жаехо, Ким Янг Жин, Ким Сеунгхван, Ли Санг-Ха. Патент на изобретение №2395876. Активная магнитная антенна с ферритовым сердечником.
О том, как прикрутить к микроконтроллеру ёмкостный сенсор прикосновения. Эта идея показалась мне довольно перспективной, некоторым приборам сенсорные клавиши подошли бы куда лучше механических. В этой статье я расскажу о своей реализации этой полезной технологии на основе отладочной платы STM32 Discovery.
Итак, только начав осваивать STM32, я решил в качестве упражнения добавить устройству способность определять прикосновения. Начав разбираться с теорией и практикой по вышеупомянутой статье, я повторил схему товарища "a. Она работала идеально, но мне, любителю минимализма, захотелось её упростить, избавившись от лишних элементов. Лишними на мой взгляд оказались внешний резистор и дорожка к питанию. Всё это уже есть в большинстве микроконтроллеров, в том числе в AVR и в STM32. Я имею в виду подтягивающие резисторы портов ввода/вывода. Почему бы не заряжать пластинку и наши пальцы через них? В ожидании подвоха я собрал на макетке схему, которая, к моему удивлению, заработала с первого же раза. Собственно говоря, схемой это называть даже смешно, ведь всё что нам нужно - это просто подсоединить контактную пластинку к ножке отладочной платы. Всю работу на себя возьмёт микроконтроллер.
Что же из себя представляет программа? Во первых две функции:
Первая выводит на ножку сенсора (нулевой пин регистра C) логический «0»
Void Sensor_Ground (void) { GPIOC->CRL = 0x1; GPIOC->BRR |= 0x1; }
Вторая настраивает тот же вывод на вход, с подтяжкой к питанию.
Void Sensor_InPullUp (void) { GPIOC->CRL = 0x8; GPIOC->BSRR |= 0x1; }
Теперь в начале цикла опроса вызовем Sensor_Ground(), и подождём некоторое время чтобы разрядить на землю весь остаточный заряд на сенсоре. Затем обнулим переменную count, которой будем считать время зарядки сенсора и вызовем Sensor_InPullUp().
Sensor_Ground(); Delay(0xFF); //простой пустой счётчик count = 0; Sensor_InPullUp();
Теперь сенсор начинает заряжаться через внутренний подтягивающий резистор номиналом порядка десятков КОм (30..50КОм у STM32). Постоянная времени такой цепи будет равняться считанным тактам, поэтому я поменял кварцевый резонатор на отладочной плате на более быстрый, 20МГц (кстати, я не сразу заметил, что оказывается на STM32 Discovery кварц меняется без пайки). Итак считаем такты процессора, пока на входе не появится логическая единица:
While(!(GPIOC->IDR & 0x1)) { count++; }
После выхода из этого цикла в переменной count будет храниться число, пропорциональное ёмкости сенсорной пластинки. В моём случае с чипом на 20МГц значение count равняется 1 при отсутствии нажатия, 7-10 при самом лёгком касании, 15-20 при нормальном прикосновении. Остаётся лишь сравнить её с пороговым значением и не забыть снова вызвать Sensor_Ground(), чтобы к следующему циклу опроса сенсор уже был разряжен.
Полученной чувствительности хватает для уверенного определения прикосновений к голым металлическим площадкам. При прикрытии сенсора листом бумаги или пластика чувствительность падает в три - четыре раза, хорошо определяются только уверенные нажатия. Чтобы увеличить чувствительность в случае, когда сенсор необходимо прикрыть защитным материалом, можно повысить тактовую частоту микроконтроллера. С чипом серии STM32F103, способном работать на частотах до 72МГц, помехой не будут и миллиметровые преграды между пальцем и сенсором.
По сравнению с реализацией "a, мой подход работает гораздо быстрее (порядка десятка тактов на опрос одного сенсора), поэтому я не стал усложнять программу, настраивая прерывания по таймеру.
Напоследок видео с демонстрацией работы сенсора.
Main.c тестовой программы.
На микроконтроллер
Cпасибо пользователю за очень полезную статью ARM-микроконтроллеры STM32F. Быстрый старт c STM32-Discovery , пользователю за идею и доходчивое теоретическое описание.
UPD. После комментариев "a я решил разобраться с тактированием и обнаружил, что по умолчанию STM32 Discovery настроен на тактовую частоту
(HSE / 2) * 6 = 24 MHz, где HSE - частота внешнего кварца. Соответственно поменяв кварц с 8 на 20 МГц, я заставил бедную STM"ку работать на 60 МГц. Так что во-первых, некоторые из выводов очевидно не совсем верны, во-вторых то чем я занимался может привести к сбоям чипа. На случай таких сбоев в микроконтроллере есть HardFault прерывание, воспользовавшись им, я проверил более высокие частоты. Так вот, сбоить чип начинает только на 70 МГц. Но хотя эту конкретную программу контроллер переваривает на 60МГц, при использовании периферии или работе с Flash памятью он может повести себя непредсказуемо. Вывод: относитесь к данному топику как к эксперименту, повторяйте только на свой страх и риск.
Датчики определения расстояния и касания
Ультразвуковой датчик
Ультразвуковой сенсор - один из двух сенсоров, заменяющих роботу зрение. Ультразвуковой сенсор позволяет роботу видеть и обнаруживать объекты. Его также можно использовать для того, чтобы робот мог обойти препятствия, оценить и измерить расстояние, а также зафиксировать движение объекта.
Показания ультразвукового датчика измеряется в сантиметрах и дюймах. Он может измерять расстояние от 0 до 255 сантиметров с точностью +/-3 см. Ультразвуковой сенсор работает по тому же принципу, что и локатор летучей мыши: он измеряет расстояние путем расчета времени, которое потребовалось звуковой волне для возвращения после отражения от объекта, подобно эху.
Крупные объекты с твердыми поверхностями определяются лучше всего. Объекты из мягких материалов (тканей) или округлые (мяч), а также слишком тонкие, маленькие и т.п., могут создавать для сенсора определенные затруднения при работе.
Следует помнить, что два и более ультразвуковых датчика, работающих в одном помещении, могут интерферировать и снижать точность результатов
К примерам применения ультразвуковых датчиков расстояния можно отнести использования в машинах для предупреждающих сигналов водителю или автоматический контроль по сигналам от датчиков, идентифицирующих опасные ситуации, объединяемых в сетевые связи, с человеко-машинным интерфейсом human - machine interface (HMI).
Рис.1
В основе ультразвукового принципа обнаружения препятствий лежит принцип эха. В состав датчика входят два преобразователя: один преобразователь излучает ультразвуковые волны, а отраженные волны обнаруживаются другим, одним или более, преобразователем. Тот же самый преобразователь, который передает ультразвуковые волны, может быть использован и для обнаружения отраженной волны. Основное назначение датчиков -- обнаруживать присутствие или отсутствие препятствия, но данный принцип (time of flight) позволяет также по времени возвращения эха при известной скорости распространения звука рассчитывать расстояние до объекта.
Ультразвук представляет собой не что иное, как вибрацию на частоте > 20 кГц. Большинство коммерчески доступных преобразователей работает на частотах в диапазоне 40-250 кГц.
Вариации акустических параметров датчиков, окружающая среда и различные цели значительно влияют на работу устройств .
В ультразвуковом датчике преобразователь генерирует короткий импульс, направляемый на цель и возвращающийся обратно
Важно, что скорость звука является функцией состава и температуры среды (воздуха) и влияет на точность и разрешение датчика. Точность измерений расстояния прямо пропорциональна точности значения скорости звука, используемого в вычислениях, и варьируется в реальных условиях от 345 м/c при комнатной температуре до более чем 380 м/c при температуре порядка 70 °C. Длина звуковой волны
является функцией скорости ультразвука c и взаимосвязана с его частотой ѓ, поэтому эти параметры (длина волны и частота) также влияют на разрешение и точность, а также минимальный размер целей и диапазон расстояний, измеряемых датчиком.
Затухание звука является функцией частоты и влажности, что влияет на максимальное расстояние, детектируемое датчиком. Длинные волны (с меньшей частотой) характеризуются меньшим затуханием. На частотах свыше 125 кГц максимальное затухание случается при относительной влажности 100%, на частотах 40 кГц -- уже при влажности в 50%. Так как датчик должен работать при любых значениях влажности, в расчетах используется максимальное затухание для каждой частоты.
Фоновые шумы являются функцией частоты и уменьшаются с ее увеличением, также оказывая влияние на максимально детектируемое расстояние и минимальный размер цели. Разрешение и точность на высоких частотах выше, тогда как диапазон выше с более длинными волнами.
Датчик касания
Датчик касания это кнопка, у которой возможно два состояния - нажато и отжато. Программно датчик распознает еще одно состояние Касание.
Увидеть на экране дисплея реакцию датчика касания можно в режиме Просмотра. При не нажатой кнопке датчика на дисплее появляется 0, а при нажатой - 1.
Добавив в конструкцию робота датчик касания (например в виде бампера) вы можете сделать так, чтобы робот изменил поведение при активации датчика.
Датчик касания является одним из органов осязания для роботов, что делает его необходимым там где требуется реакция робота на объекты.
Датчик касания позволяет роботу осуществлять прикосновения.
Сенсор нажатия может определить момент нажатия на него чего-либо, а так же момент освобождения.
Датчик касания представлен на рис.2.
Рис.2 Датчик касания
Используемые образцовые приборы и дополнительное оборудование
Микрометр
Для замера холостого хода у датчика касания необходим микрометр (или Индикатор часового типа) ИЧ-25 который будет измерять расстояние прошедшее датчиком до момента срабатывания.
ИЧ-25 предназначен для измерения линейных размеров абсолютным и относительным методами, определения величины отклонений от заданной геометрической формы и взаимного расположения поверхностей.
На рис.3 представлены несколько видов индикаторов.

Рис.3.
Параметры микрометра ИЧ 25:
Диапазон измерений 0-25 мм.
Цена деления 0.01 мм.
Габариты 159х85х51 мм.